In this article we connect an ICM-20948 9-axis Motion Tracking device to an ESP32
Lets look at the sensor
Sensor Information
The ICM-20948 is the world’s lowest power 9-axis Motion Tracking device that is ideally suited for Smartphones, Tablets, Wearable Sensors, and IoT applications.
- 1/3 the power of existing 9-axis devices
- 3-axis gyroscope, 3-axis accelerometer, 3-axis compass, and a Digital Motion Processor™ (DMPTM) in a 3x3x1mm (24-pin QFN) package
- DMP offloads computation of motion processing algorithms from the host processor, improving system power performance
- Software drivers are fully compliant with Google’s latest Android release
- EIS FSYNC support
ICM-20948 supports an auxiliary I2C interface to external sensors, on-chip 16-bit ADCs, programmable digital filters, an embedded temperature sensor, and programmable interrupts.
The device features an operating voltage range down to 1.71V. Communication ports include I 2C and high speed SPI at 7MHz.
Features
• Lowest Power 9-Axis Device at 2.5 mW
• 3-Axis Gyroscope with Programmable FSR of ±250 dps, ±500 dps, ±1000 dps, and ±2000 dps
• 3-Axis Accelerometer with Programmable FSR of ±2g, ±4g, ±8g, and ±16g
• 3-Axis Compass with a wide range to ±4900 µT
• Onboard Digital Motion Processor (DMP)
• Android support
• Auxiliary I2C interface for external sensors
• On-Chip 16-bit ADCs and Programmable Filters
• 7 MHz SPI or 400 kHz Fast Mode I²C
• Digital-output temperature sensor
• VDD operating range of 1.71V to 3.6V
Parts Required
The sensor you can pick up in the $12 price range – you can connect to the sensor using a standard header the classic dupont style jumper wire.
| Name | Link | |
| ESP32 |  |
|
| ICM20948 | ||
| Connecting cables |  |
Schematic/Connection
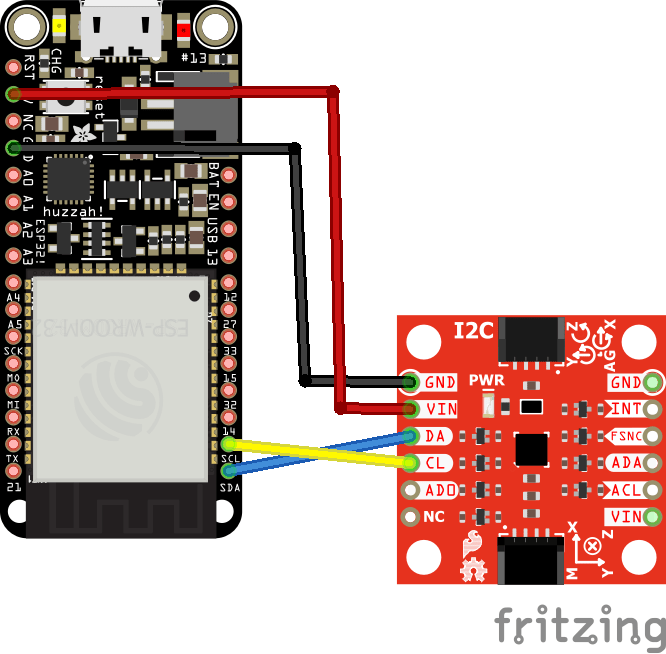
ESP32 and ICM20948 layout
Code Example
This uses a library from Adafruit installed using the Library Manager in the Arduino IDE. search for ICM20X, and select the Adafruit_ICM20X library. You will also need to add another couple of libraries Adafruit BusIO library and the Adafruit Unified Sensor library
My sensor I2C address was 0x68 so I had to modify the library
The file that needed to be modified – Adafruit_ICM20948.h and then change this line
#define ICM20948_I2CADDR_DEFAULT 0x68 ///< ICM20948 default i2c address
And now for the example
// Basic demo for accelerometer readings from Adafruit ICM20948
#include <Adafruit_ICM20X.h>
#include <Adafruit_ICM20948.h>
#include <Adafruit_Sensor.h>
#include <Wire.h>
Adafruit_ICM20948 icm;
uint16_t measurement_delay_us = 65535; // Delay between measurements for testing
// For SPI mode, we need a CS pin
#define ICM_CS 10
// For software-SPI mode we need SCK/MOSI/MISO pins
#define ICM_SCK 13
#define ICM_MISO 12
#define ICM_MOSI 11
void setup(void) {
Serial.begin(115200);
while (!Serial)
delay(10); // will pause Zero, Leonardo, etc until serial console opens
Serial.println("Adafruit ICM20948 test!");
// Try to initialize!
if (!icm.begin_I2C()) {
// if (!icm.begin_SPI(ICM_CS)) {
// if (!icm.begin_SPI(ICM_CS, ICM_SCK, ICM_MISO, ICM_MOSI)) {
Serial.println("Failed to find ICM20948 chip");
while (1) {
delay(10);
}
}
Serial.println("ICM20948 Found!");
// icm.setAccelRange(ICM20948_ACCEL_RANGE_16_G);
Serial.print("Accelerometer range set to: ");
switch (icm.getAccelRange()) {
case ICM20948_ACCEL_RANGE_2_G:
Serial.println("+-2G");
break;
case ICM20948_ACCEL_RANGE_4_G:
Serial.println("+-4G");
break;
case ICM20948_ACCEL_RANGE_8_G:
Serial.println("+-8G");
break;
case ICM20948_ACCEL_RANGE_16_G:
Serial.println("+-16G");
break;
}
Serial.println("OK");
// icm.setGyroRange(ICM20948_GYRO_RANGE_2000_DPS);
Serial.print("Gyro range set to: ");
switch (icm.getGyroRange()) {
case ICM20948_GYRO_RANGE_250_DPS:
Serial.println("250 degrees/s");
break;
case ICM20948_GYRO_RANGE_500_DPS:
Serial.println("500 degrees/s");
break;
case ICM20948_GYRO_RANGE_1000_DPS:
Serial.println("1000 degrees/s");
break;
case ICM20948_GYRO_RANGE_2000_DPS:
Serial.println("2000 degrees/s");
break;
}
// icm.setAccelRateDivisor(4095);
uint16_t accel_divisor = icm.getAccelRateDivisor();
float accel_rate = 1125 / (1.0 + accel_divisor);
Serial.print("Accelerometer data rate divisor set to: ");
Serial.println(accel_divisor);
Serial.print("Accelerometer data rate (Hz) is approximately: ");
Serial.println(accel_rate);
// icm.setGyroRateDivisor(255);
uint8_t gyro_divisor = icm.getGyroRateDivisor();
float gyro_rate = 1100 / (1.0 + gyro_divisor);
Serial.print("Gyro data rate divisor set to: ");
Serial.println(gyro_divisor);
Serial.print("Gyro data rate (Hz) is approximately: ");
Serial.println(gyro_rate);
// icm.setMagDataRate(AK09916_MAG_DATARATE_10_HZ);
Serial.print("Magnetometer data rate set to: ");
switch (icm.getMagDataRate()) {
case AK09916_MAG_DATARATE_SHUTDOWN:
Serial.println("Shutdown");
break;
case AK09916_MAG_DATARATE_SINGLE:
Serial.println("Single/One shot");
break;
case AK09916_MAG_DATARATE_10_HZ:
Serial.println("10 Hz");
break;
case AK09916_MAG_DATARATE_20_HZ:
Serial.println("20 Hz");
break;
case AK09916_MAG_DATARATE_50_HZ:
Serial.println("50 Hz");
break;
case AK09916_MAG_DATARATE_100_HZ:
Serial.println("100 Hz");
break;
}
Serial.println();
}
void loop() {
// /* Get a new normalized sensor event */
sensors_event_t accel;
sensors_event_t gyro;
sensors_event_t mag;
sensors_event_t temp;
icm.getEvent(&accel, &gyro, &temp, &mag);
Serial.print("\t\tTemperature ");
Serial.print(temp.temperature);
Serial.println(" deg C");
/* Display the results (acceleration is measured in m/s^2) */
Serial.print("\t\tAccel X: ");
Serial.print(accel.acceleration.x);
Serial.print(" \tY: ");
Serial.print(accel.acceleration.y);
Serial.print(" \tZ: ");
Serial.print(accel.acceleration.z);
Serial.println(" m/s^2 ");
Serial.print("\t\tMag X: ");
Serial.print(mag.magnetic.x);
Serial.print(" \tY: ");
Serial.print(mag.magnetic.y);
Serial.print(" \tZ: ");
Serial.print(mag.magnetic.z);
Serial.println(" uT");
/* Display the results (acceleration is measured in m/s^2) */
Serial.print("\t\tGyro X: ");
Serial.print(gyro.gyro.x);
Serial.print(" \tY: ");
Serial.print(gyro.gyro.y);
Serial.print(" \tZ: ");
Serial.print(gyro.gyro.z);
Serial.println(" radians/s ");
Serial.println();
delay(500);
}
Output
Here is an example of what I saw in the serial monitor window
Temperature 33.31 deg C
Accel X: -1.23 Y: 0.00 Z: 1.22 m/s^2
Mag X: 1185.60 Y: 2456.85 Z: 75.00 uT
Gyro X: 0.00 Y: 0.00 Z: -0.05 radians/s
Temperature 33.31 deg C
Accel X: -1.23 Y: 0.00 Z: 1.22 m/s^2
Mag X: 1185.60 Y: 2456.85 Z: 75.00 uT
Gyro X: 0.00 Y: 0.00 Z: -0.05 radians/s
Temperature 33.31 deg C
Accel X: -1.23 Y: 0.00 Z: 1.22 m/s^2
Mag X: 1185.60 Y: 2456.85 Z: 75.00 uT
Gyro X: 0.00 Y: 0.00 Z: -0.05 radians/s
Links